Published June 11, 2025
The Beckhoff TwinCAT™ platform is a powerful alternative to LabVIEW™ Realtime and National Instruments hardware. MGI’s Twinterface Package (formerly called TwinCAT Strict), makes it trivial to set up communications between LabVIEW and TwinCAT projects.
MGI became interested in using TwinCAT in systems after NI abandoned their motion control board product line. We have a customer where we’ve spent a couple decades helping them field ultrasonic inspection machines on their manufacturing lines with a dozen or more axes of complex motion control. By using digital motor drives with Ethercat connections and TwinCAT based controllers, we have been able to create a new motion control module for our customer that’s largely indistinguishable to the rest of our program from the NI Motion board based solution.
With the knowledge we gained, we released the first version of Twinterface, our product for burying the variant based TwinCAT LabVIEW driver in a set of strictly typed wrapper classes that make a much cleaner looking interface. Now that we’ve been using TwinCAT on some other projects, we’re stepping it up a notch with a 1.0 release that uses LabVIEW scripting to totally automate the setup of the interface. A more detailed description and instructions are available on our new Twinterface Product Page but here I’ll just show the VI you can create one minute after using our new script.
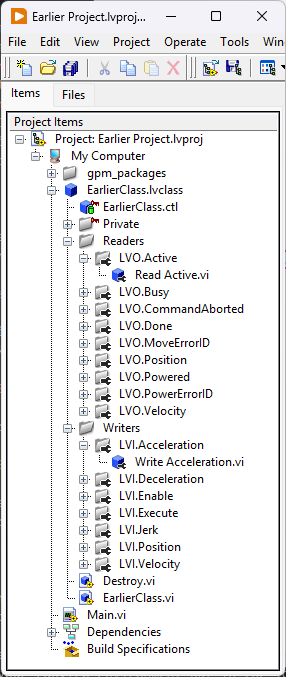
The class that’s produced will look something like this
Now by dropping the constructor, the destructor, and two property nodes you can get something like this
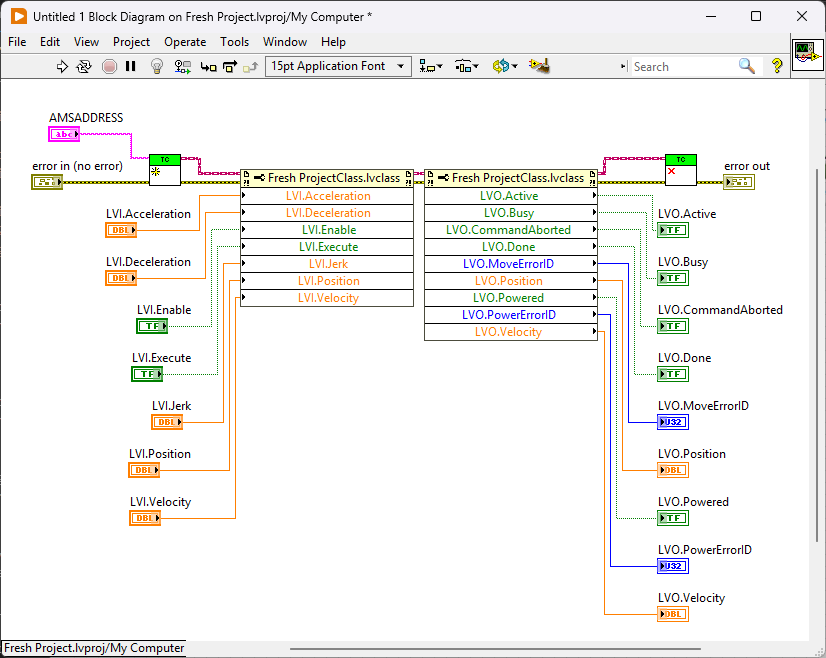
which is enough code to begin testing your interface at a simple level.
TwinCAT is a trademark of Beckhoff Automation GmbH. LabVIEW is a trademark of National Instruments.
